KDE-k megoldása Matlabban
Contents
- Egyismeretlenes elsőrendű közönséges differenciálegyenlet
- Malthus-féle növekedési modell
- Paraméterek megadása
- Verlust-féle logisztikus modell
- Többismeretlenes elsőrendű közönséges differenciálegyenletrendszer
- Kétfajos Lotka-Volterra ragadozó-zsákmány modell
- Fázisportré
- Számítási pontosság
- Egyensúlyi helyzetek típusai
- Másodrendű közönséges differenciálegyenlet megoldása
- Kőhajítás
Egyismeretlenes elsőrendű közönséges differenciálegyenlet
Malthus-féle növekedési modell
Jelöljük a t időpillanatban egy faj egyedeinek számát N(t)-vel. Ekkor N'(t) jelöli a változás sebességet. Ha korlátlan mennyiségben áll rendelkezésre tápanyag, akkor N'(t) egyenesen arányos az adott pillanatban jelenlévő egyedek számával, azaz a differenciálegyenlet: N'(t)=rN(t), ahol r>0 arányossági tényező. Ezen differenciálegyenletet szeretnénk megoldani Matlabban.
function dy=malthus(t,y)
dy=0.3*y;
Az általános megoldó az ode45, ennek használatához szükségünk van a külön fájlban lévő differenciálegyenletre, egy kezdeti feltételre, és egy időintervallumra, amin meg szeretnénk oldani a differenciálegyenletet.
[T,Y]=ode45(@malthus,[0,20],1);
Ekkor ábrázolva a megoldást:
plot(T,Y)
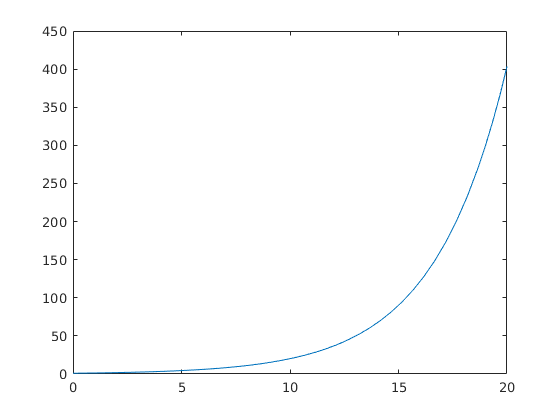
Látjuk, hogy egy egyedből 20 időegység alatt több mint 400 lett. Ez történik például sáskajáráskor.
Paraméterek megadása
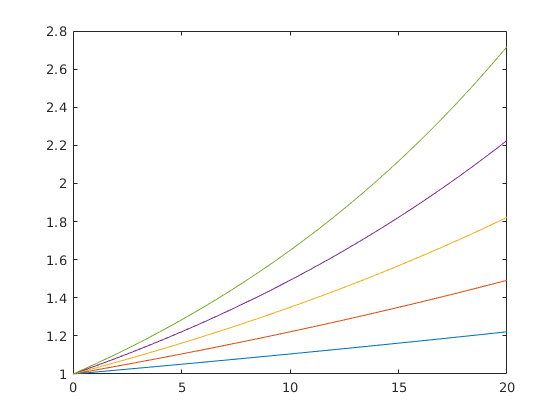
Ha a paramétert nem a differenciálegyenlet belsejében szeretnénk megadni (mert például különböző paraméterértékekre is meg szeretnénk oldani az egyenletet), akkor a function handle-t tudjuk használni. Most úgy írjuk fel a függvényt, hogy a paramétertől is függ:
function dy=malthus2(t,y,r)
dy=r*y;
A malthus2 -ben leírt differenciálegyenletet megoldva:
for i=1:5 r=i/100; [T,Y]=ode45(@(t,y)malthus2(t,y,r),[0,20],1); plot(T,Y) hold on end hold off
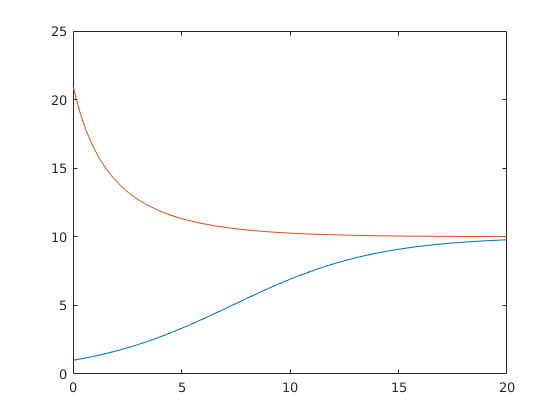
Verlust-féle logisztikus modell
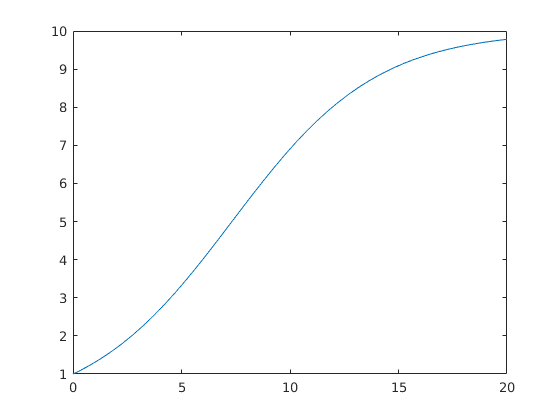
A Malthus-féle modell nem veszi figyelembe a környezet fenntartó képességét. Ezt például úgy vehetjük figyelembe, a növekedés üteme nem konstans lesz, hanem ha a környezet fenntartó képességét K-val jelöljük, akkor a növekedés üteme rN(t)(1-N(t)/K)-val lesz arányos (azaz ha N(t)>K, akkor negatív, így csökken az egyedszám). Ekkor:
function dy=verlust(t,y)
dy=0.3*y.*(1-y/10);
A megoldás:
[T,Y]=ode45(@verlust,[0,20],1); plot(T,Y)
Ez is érdekes:
[T2,Y2]=ode45(@verlust,[0,20],21); hold on plot(T2,Y2); hold off
Többismeretlenes elsőrendű közönséges differenciálegyenletrendszer
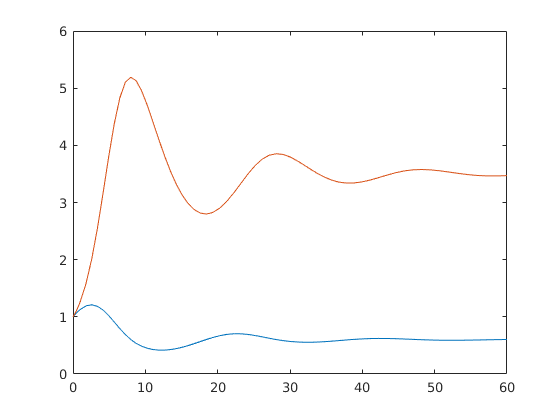
Kétfajos Lotka-Volterra ragadozó-zsákmány modell
Tegyük fel, hogy két faj él együtt: egy növényevő és egy ragadozó. Szeretnénk az ő kapcsolatukat modellezni. Növényevő önnmagában egy Verlust-típusú modell szerint növelkedne, azaz N(t)-vel jelölve az egyedszámot: N'(t)=r(1-N(t)/K)N(t) viszont ha jelen van egy ragadozó faj is (jelölje P(t) az ő elemszámát): N'(t)=r(1-N(t)/K)N(t)-a*N(t)*P(t) itt alfa az méri, hogy mennyire hatékony ragadozó P. Az általa elejtett zsákmány mennyisége arányos továbbá azzal, hogy mennyi zsákmányállat van jelen, illetve azzal, hogy mennyi ragadozó van jelen. A ragadozó száma zsákmányállat nélkül csökkenne (mert éhenhalnának), de az elejtett zsákmányállatok egy részét gyarapodásra fordítják, így az ő egyenletük: P'(t)=-bP(t)+cN(t)P(t) Ezen egyenletrendszer szeretnénk megoldani Matlabban. Ehhez:
function dy = lotvol(t,y)
r=0.5;
K=2;
a=0.1;
b=0.3;
c=0.5;
dy = [ r*(1-y(1)/K)*y(1)-a*y(1)*y(2); -b*y(2)+c*y(1)*y(2)];
Most a megoldáshoz 2 kezdeti feltételre van szükség:
[T,Y]=ode45(@lotvol,[0,60],[1,1]); plot(T, Y(:,1),T, Y(:,2))
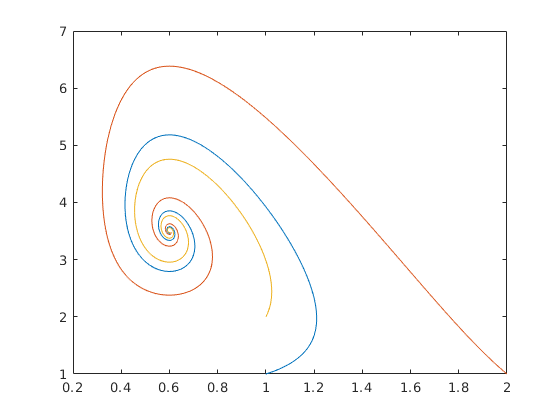
Fázisportré
Kirajzolhatjuk a fázisportrét is, azaz, hogy hogyan alakul az állatok száma egymáshoz képest:
plot(Y(:,1),Y(:,2))
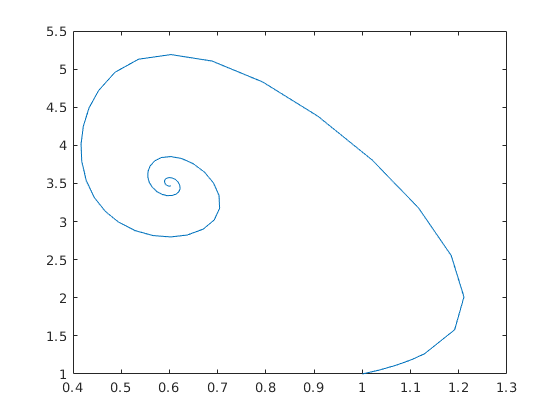
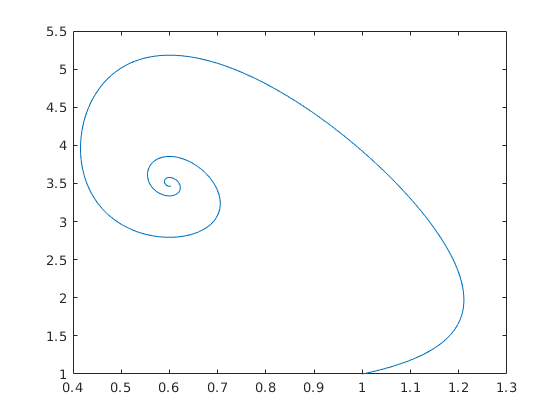
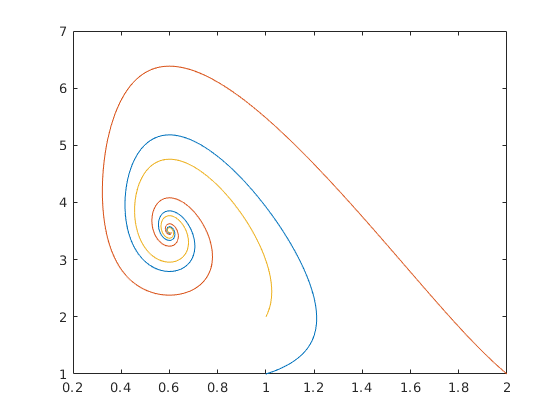
Számítási pontosság
Láthatjuk, hogy a fázisportrén a megoldások ábrája már 'darabos', töröttvonal-szerű. A számítási pontosság növelésével kisimíthatjuk az ábrát, azaz pontossabban közelíthetjük a megoldást. Az alapértelmezett hiba 10^-6 a relatív és az abszolút hibára is.
beallitasok = odeset('RelTol',1e-10,'AbsTol',1e-10); [T3,Y3]=ode45(@lotvol,[0,60],[1,1],beallitasok); plot(Y3(:,1),Y3(:,2))
Egyensúlyi helyzetek típusai
Azt is megfigyelhetjük, hogy a megoldások viselkedése nem függ attól, hogy a 0 időpillanatban milyen egyedsűrűségekből indult a rendszer
[T ,Y ]=ode45(@lotvol,[0,60],[1,1],beallitasok); [T2,Y2]=ode45(@lotvol,[0,60],[2,1],beallitasok); [T3,Y3]=ode45(@lotvol,[0,60],[1,2],beallitasok); plot(Y(:,1),Y(:,2), Y2(:,1),Y2(:,2), Y3(:,1),Y3(:,2) )
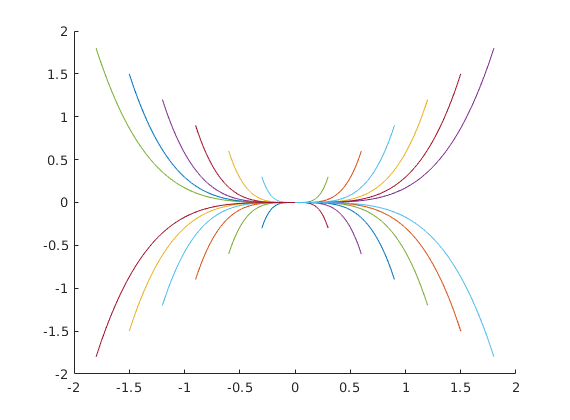
Linearizálással bebizonyíthatjuk, hogy az egyensúlyi helyezet asziptótikusan stabil fókusz, amely azonban csak bizonyos paraméter értékeknél helyezkedik el a pozitív negyedsíkban.
A fókuszon kívűl egy kétdimenziós rendszer egyensúlyi helyzete lehet még csomó:
function dy=csomo(t,y)
dy=[-y(1); -4*y(2)];
figure hold on for i=0:0.3:2 [T,Y]=ode45(@csomo,[0,60], [i,i],beallitasok); plot(Y(:,1),Y(:,2) ) [T2,Y2]=ode45(@csomo,[0,60], [-i,i],beallitasok); plot(Y2(:,1),Y2(:,2) ) [T4,Y4]=ode45(@csomo,[0,60], [i,-i],beallitasok); plot(Y4(:,1),Y4(:,2) ) [T5,Y5]=ode45(@csomo,[0,60], [-i,-i],beallitasok); plot(Y5(:,1),Y5(:,2) ) end hold off
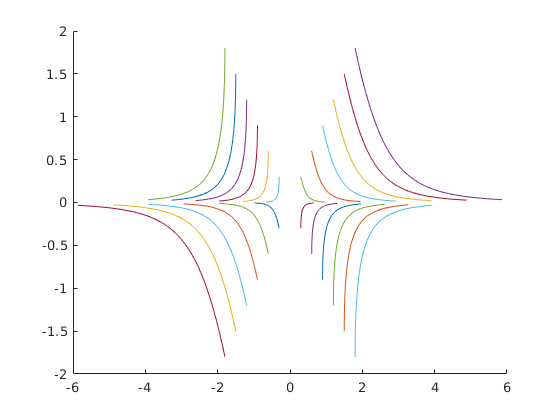
illetve nyereg
function dy=nyereg(t,y)
dy=[y(1)+y(2); -4*y(2)];
figure hold on for i=0:0.3:2 [T,Y]=ode45(@nyereg,[0,1], [i,i],beallitasok); plot(Y(:,1),Y(:,2) ) [T2,Y2]=ode45(@nyereg,[0,1], [-i,i],beallitasok); plot(Y2(:,1),Y2(:,2) ) [T4,Y4]=ode45(@nyereg,[0,1], [i,-i],beallitasok); plot(Y4(:,1),Y4(:,2) ) [T5,Y5]=ode45(@nyereg,[0,1], [-i,-i],beallitasok); plot(Y5(:,1),Y5(:,2) ) end hold off
Másodrendű közönséges differenciálegyenlet megoldása
Kőhajítás
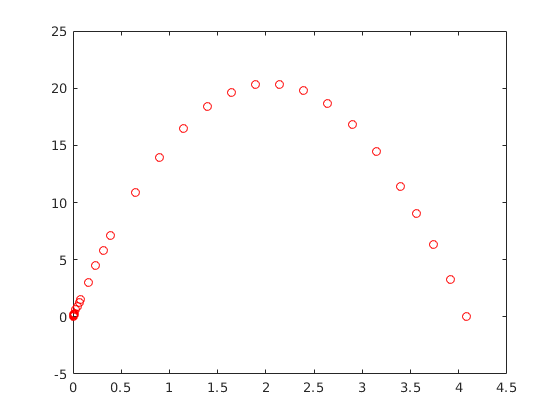
Tegyük fel, hogy eldobunk egy követ függőlegesen felfelé, jelöljük a kő magasságát t időpontban y(t)-vel. Ekkor hat rá a gravitáció, ami gyorsulást okoz lefelé irányba. Ez azt jelenti, hogy függőleges irányban a gyorsulása: -g (ami nagyjából 9.8 m/s^2). Ekkor a differenciálegyenlet y''(t)=-9.8 lesz. A Matlab azonban csak elsőrendű differenciálegyenleteket tud kezelni, ezért át kell alakítanunk egy elsőrendű rendszerré. Legyen v(t) a kő sebessége a t időpontban. Ekkor y'(t)=v(t), illetve v'(t)=-9.8 (mert a sebesség deriváltja a gyorsulás); azaz vektorosan összefoglalva a helyzetet (első koordináta) és a sebességet (második koordináta):
function dyv = ko(t,yv) %yv(1), a magasság: y(t) %yv(2) a függőleges sebesség: v(t) dyv = [yv(2); -9.8]; %fontos, hogy oszlopvektorként adjuk meg
Legyen a kezdősebesség 20 m/s, és a földről indul, azaz 0 magasságról, így a megoldó az első 10 másodpercre
[T3,Y3]=ode45(@ko, [0, 10],[0,20]); plot(T3,Y3(:,1), 'rO', T3,Y3(:,2),'b')
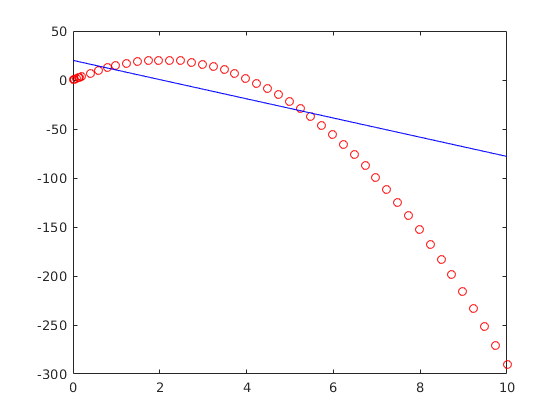
Láthatjuk, hogy a magasság negatív a végén. Ennek nincs értelme, hiszen a kő elvben nem mehet a föld alá, ezért meg kell állítani a megoldót, amikor eléri a 0 magasságot. Ehhez esemény-detektálásra van szükség, azaz kell készíteni egy esemény függvényt:
function [ertek,megalle,irany] = esemeny(t,y)
ertek = y(1);
megalle = 1;
irany = 0;
% Ennek használatához a megoldónak át kell adni az eseményt detektáló % függvényt, amelyet az odeset parancson keresztül tehetünk meg. beallitasok = odeset('Events',@esemeny,'RelTol', 10^-6); [T4,Y4] = ode45(@ko,[0 10],[0,20],beallitasok); plot(T4,Y4(:,1), 'rO') % Itt amikor 0 lett a magasság, nem számol tovább. A T4 vektorban összegyűjti, % hogy mely pontban számolta ki (közelítette) a megoldást. T4 utolsó eleme % az, amikor megállt a megoldó T4(end) % ebből láthatjuk, hogy kb 4 másodperc alatt esett vissza a földre a kő.
ans =
4.0816